Sistemi di estrazione avanzati
Con l’aumento della complessità geometrica dei componenti stampati, le tradizionali slitte meccaniche non sempre sono sufficienti per gestire sottosquadri profondi, nuclei arcuati o sistemi di estrazione avanzati.
In questi casi i progettisti stampi ricorrono a sistemi di estrazione avanzati capaci di trasformare il movimento di apertura dello stampo in movimenti rotativi, curvilinei o amplificati.
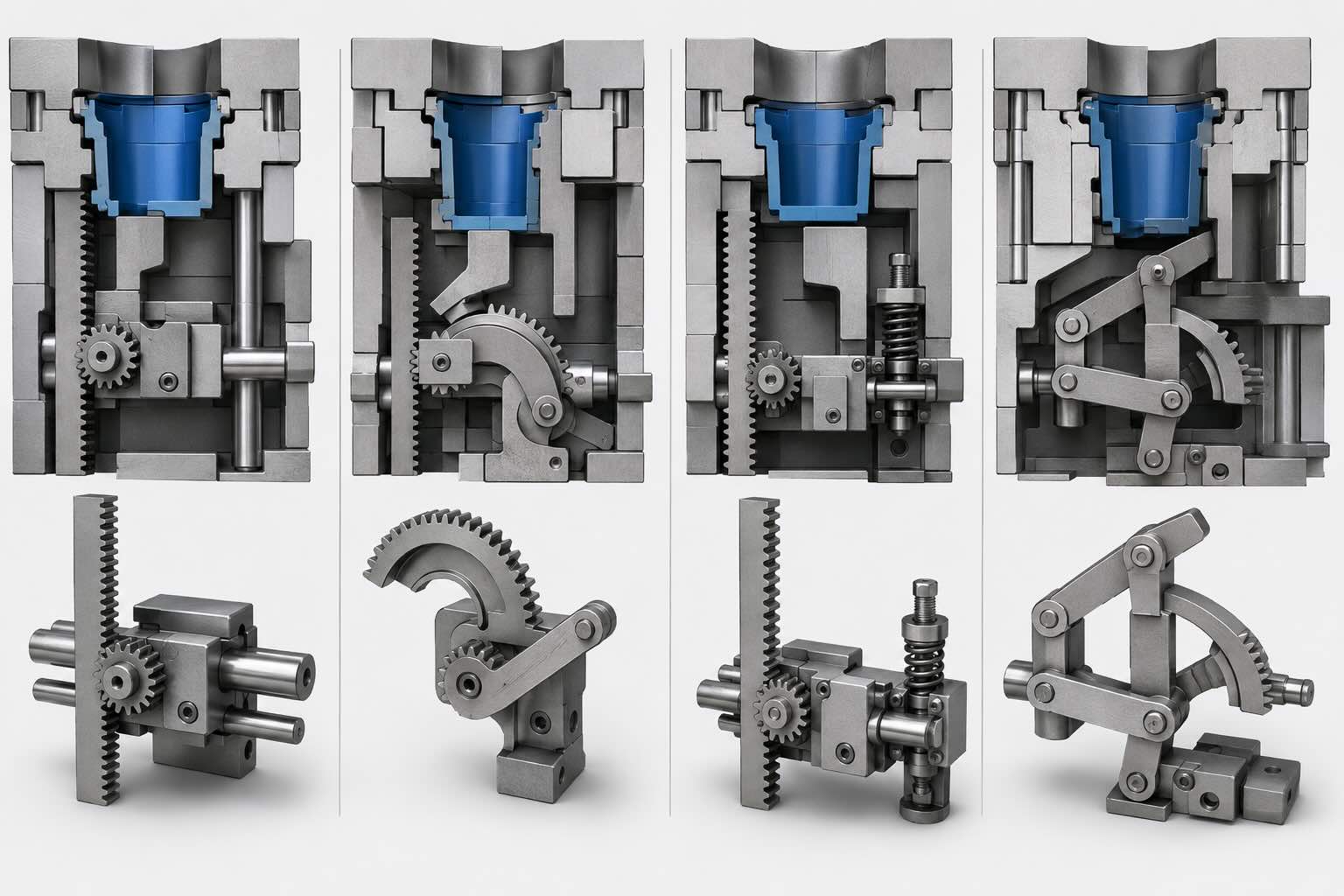
I meccanismi analizzati in questo articolo sono:
- Meccanismo 6 – Estrazione obliqua a cremagliera e pignone
- Meccanismo 7 – Nucleo arcuato a cremagliera e pignone
- Meccanismo 8 – Cremagliera trascinata dall’apertura stampo
- Meccanismo 9 – Nucleo arcuato con cinematismo articolato
Questi sistemi rappresentano spesso l’alternativa ideale ai circuiti idraulici quando si desidera mantenere semplicità costruttiva e ridurre la manutenzione.
Quando una Slitta Non Basta Più
Una normale slitta laterale è generalmente adatta per:
- sottosquadri fino a circa 50 mm;
- movimenti lineari;
- geometrie relativamente semplici.
Quando invece il progetto richiede:
- traiettorie curve;
- corse elevate;
- movimenti sincronizzati;
- nuclei arcuati;
- spazi di installazione ridotti;
diventa necessario utilizzare sistemi cinematici più sofisticati.
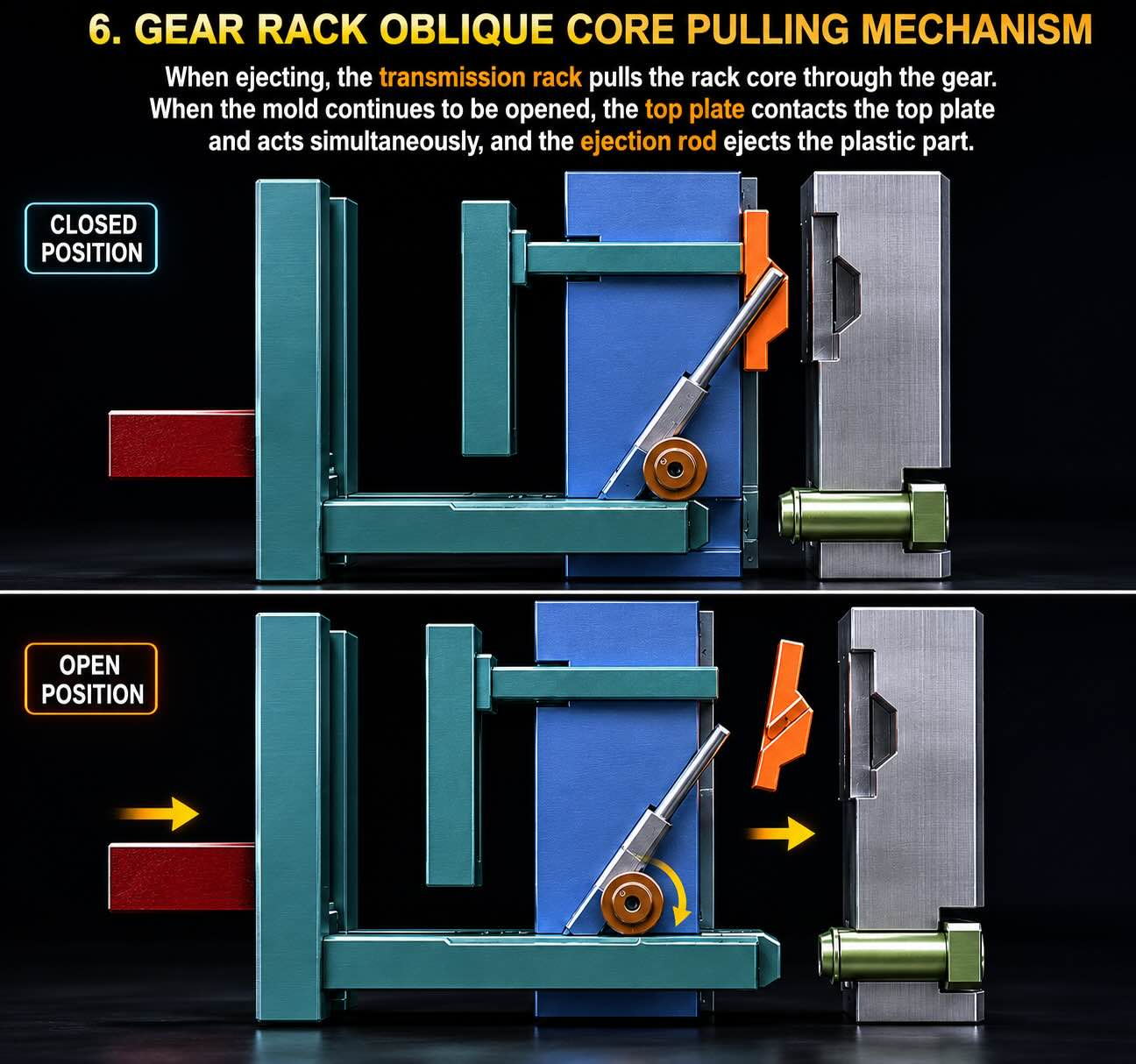
Meccanismo 6 – Estrazione Obliqua a Cremagliera e Pignone
Principio di Funzionamento
L’apertura dello stampo genera un movimento lineare che viene trasferito a una cremagliera.
La cremagliera mette in rotazione un pignone che a sua volta aziona un secondo elemento mobile collegato al nucleo laterale.
L’intero sistema funziona come una trasmissione meccanica capace di modificare velocità, corsa e forza.
Vantaggi
- maggiore corsa disponibile;
- elevata precisione;
- sincronizzazione controllata;
- nessuna centralina idraulica.
Criticità Progettuali
Le dentature devono essere dimensionate per evitare:
- usura accelerata;
- deformazioni;
- perdita di sincronizzazione.
Applicazioni Tipiche
- componenti automotive;
- raccordi tecnici;
- connettori industriali;
- componenti con sottosquadri profondi.
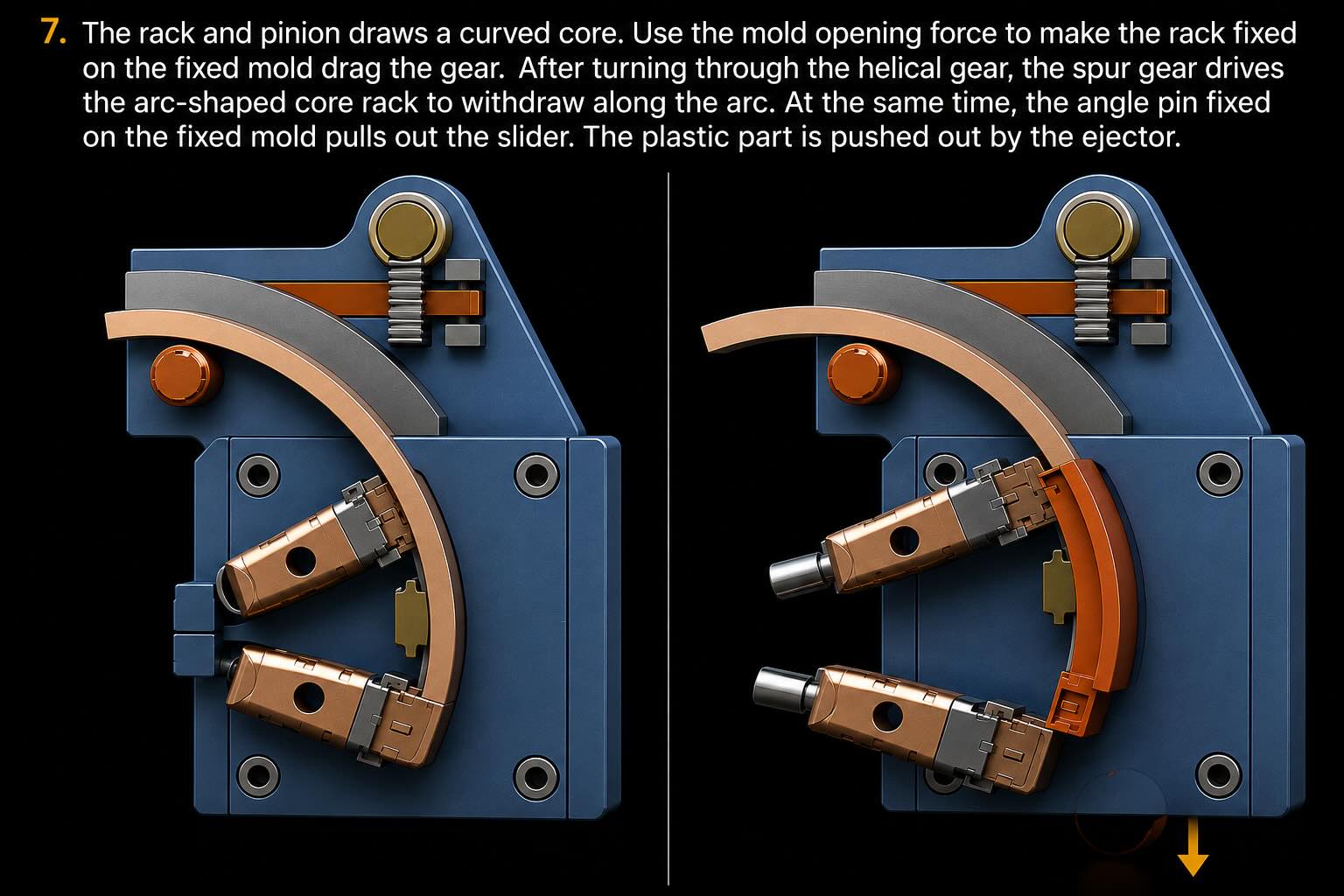
Meccanismo 7 – Nucleo Arcuato a Cremagliera e Pignone
Principio di Funzionamento
In questo sistema il movimento della cremagliera non genera una semplice traslazione.
La rotazione del pignone movimenta un nucleo arcuato che segue una traiettoria curva.
Questo permette di estrarre sottosquadri impossibili da gestire con movimenti lineari.
Aspetti di Progettazione
La precisione della traiettoria dipende da:
- diametro del pignone;
- raggio del nucleo arcuato;
- gioco tra gli ingranaggi;
- precisione delle guide.
Errori Comuni
- dentature troppo piccole;
- giochi eccessivi;
- scarsa lubrificazione.
Applicazioni
- raccordi plastici;
- chiusure tecniche;
- componenti medicali;
- componenti con geometrie circolari.
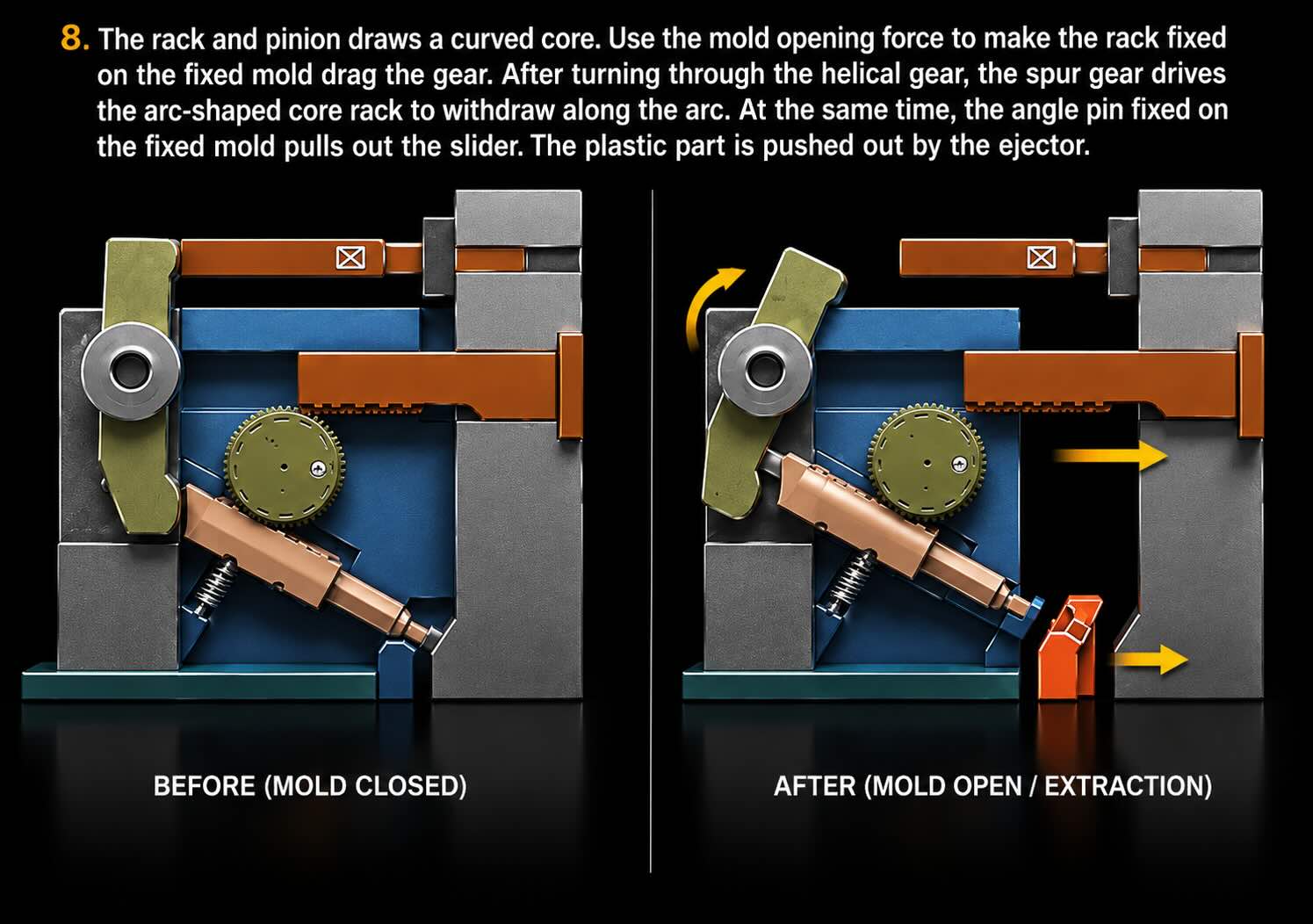
Meccanismo 8 – Cremagliera Trascinata dall’Apertura Stampo
Principio di Funzionamento
In questo sistema la forza necessaria al movimento viene generata direttamente dall’apertura dello stampo.
La cremagliera trascina il pignone che converte il movimento in una traslazione del nucleo laterale.
Una caratteristica interessante è l’assenza di attuatori indipendenti.
Vantaggi
- elevata affidabilità;
- ridotta manutenzione;
- semplicità costruttiva;
- costi contenuti.
Possibili Problemi
Uno dei punti più critici è il sistema di posizionamento finale.
Se il perno di arresto o il sistema elastico risultano sottodimensionati, possono verificarsi:
- usura;
- perdita di precisione;
- vibrazioni.
Applicazioni
- stampi ad alta produttività;
- stampi multi-impronta;
- componenti tecnici.
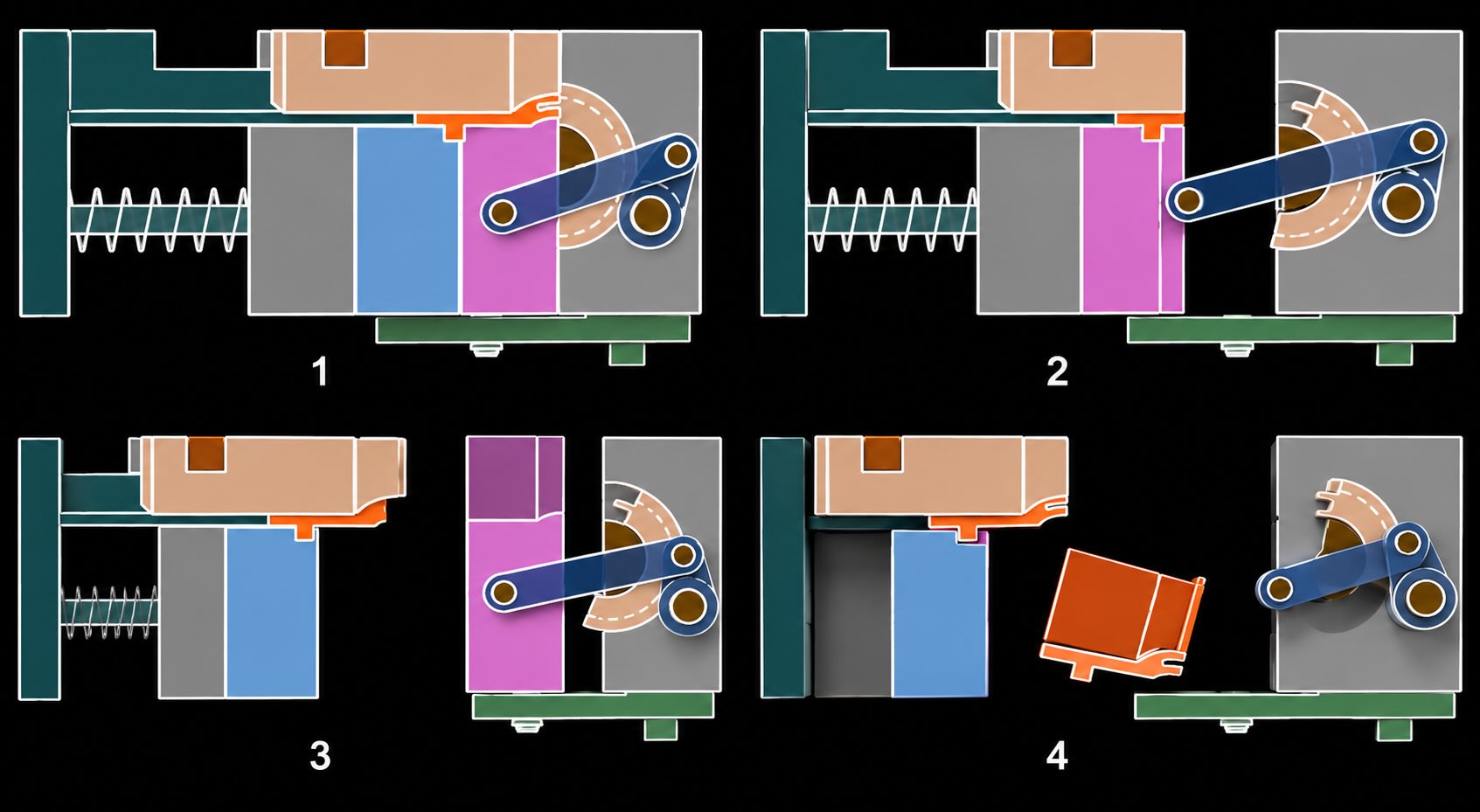
Meccanismo 9 – Nucleo Arcuato con Cinematismo Articolato
Principio di Funzionamento
Questo è probabilmente il sistema più sofisticato tra quelli analizzati.
Come abbiamo osservato nelle sequenze cinematiche, il movimento non viene trasferito direttamente al nucleo arcuato.
L’apertura dello stampo aziona un cursore che trascina una leva articolata.
La leva ruota attorno a un perno fisso e trasferisce il movimento al nucleo arcuato.
Il nucleo segue una traiettoria progressiva che permette di liberare il sottosquadro mantenendo ingombri ridotti.
Analisi Cinematica
La cinematica del sistema dipende da:
- lunghezza della biella;
- posizione dei perni;
- raggio del nucleo arcuato;
- corsa disponibile.
Piccole variazioni geometriche possono modificare significativamente:
- angolo di rotazione;
- forza disponibile;
- velocità di estrazione.
Vantaggi
- movimento estremamente controllato;
- elevata precisione;
- ridotte interferenze;
- possibilità di seguire traiettorie complesse.
Limiti
- progettazione più complessa;
- maggiore numero di componenti;
- costi superiori;
- manutenzione più frequente.
Applicazioni
- tappi tecnici;
- componenti filettati;
- raccordi complessi;
- componenti con sottosquadri curvilinei.
Tabella Comparativa
| Caratteristica | M6 | M7 | M8 | M9 |
|---|---|---|---|---|
| Complessità | Media | Alta | Media | Molto Alta |
| Precisione | Alta | Molto Alta | Alta | Molto Alta |
| Corsa | Alta | Media | Alta | Media |
| Costo | Medio | Medio-Alto | Medio | Alto |
| Manutenzione | Media | Media | Bassa | Media |
| Traiettorie Curve | No | Sì | No | Sì |
Materiali Consigliati
| Componente | Materiale Tipico |
| Cremagliera | 1.2379 temprato |
| Pignone | 1.2379 temprato |
| Perni | 1.3505 temprato |
| Boccole | Bronzo o acciaio rivestito |
| Guide | Acciaio nitrurato |
Durezze consigliate:
- Cremagliere: 58–62 HRC
- Pignoni: 58–62 HRC
- Perni: 60–64 HRC
Manutenzione Preventiva
Per produzioni ad alto volume è consigliato:
Ogni 250.000 cicli
- controllo lubrificazione;
- verifica giochi;
- pulizia guide.
Ogni 1.000.000 di cicli
- controllo usura dentature;
- verifica perni;
- controllo allineamenti.
Ogni 2.000.000 di cicli
- sostituzione preventiva dei componenti maggiormente sollecitati.
Errori di Progettazione Più Frequenti
I problemi osservati più frequentemente sono:
- corsa insufficiente;
- errato rapporto cinematico;
- dentature sottodimensionate;
- leve troppo flessibili;
- perni sottodimensionati;
- mancanza di lubrificazione;
- interferenze tra nucleo e pezzo.
La maggior parte di questi problemi può essere individuata già durante la fase di progettazione CAD.
Come Scegliere il Sistema Corretto
Scegli il Meccanismo 6 quando:
- servono corse elevate;
- il movimento è lineare.
Scegli il Meccanismo 7 quando:
- il nucleo deve seguire una traiettoria arcuata.
Scegli il Meccanismo 8 quando:
- desideri massima semplicità e affidabilità.
Scegli il Meccanismo 9 quando:
- la geometria richiede un controllo cinematico avanzato.
Conclusioni
I meccanismi avanzati di core pulling rappresentano una categoria di soluzioni altamente specializzate che permettono di gestire sottosquadri complessi senza ricorrere necessariamente a sistemi idraulici.
Quando correttamente progettati, questi sistemi offrono elevata precisione, lunga durata operativa e notevole flessibilità progettuale.
Per molti stampi tecnici, rappresentano il miglior compromesso tra prestazioni, affidabilità e costi di manutenzione.